¿Te gustaría crear tu propio brazo robótico controlado por Bluetooth? En este nuevo proyecto veremos el paso a paso del proceso de construcción de un brazo robótico personalizado utilizando Arduino y una estructura de metal cortada por láser. Además, exploraremos cómo puedes crear/diseñar tus propias piezas de metal de forma sencilla utilizando servicios como LaserBoost.com. ¡Vamos a empezar!
Materiales Necesarios
1. Placa Arduino (por ejemplo, Arduino Uno o Arduino Nano)
2. Módulo Bluetooth HC-05
3. Servomotores (al menos 4)
4. Láminas de metal para la estructura del brazo robótico
5. Tornillos y tuercas
6. Cableado
7. Fuente de alimentación para los servomotores
8. Computadora con conexión Bluetooth
Paso a Paso del Proyecto
1. Diseño de la Estructura del Brazo Robótico:
– Utiliza un software de diseño asistido por ordenador (CAD) para crear el diseño de la estructura del brazo robótico.
– Una vez completado el diseño, exporta los archivos en formato compatible con el servicio de corte por láser.
2. Envío de los Archivos a LaserBoost.com:
– Visita el sitio web www.laserboost.com/es y carga los archivos de diseño de tu estructura del brazo robótico.
– Selecciona el material y el grosor que deseas para las láminas de metal.
– Utiliza el cotizador en tiempo real para obtener el precio exacto del corte por láser y realiza el pedido.
3. Construcción del Brazo Robótico:
– Una vez que recibas las láminas de metal cortadas por láser, ensambla la estructura del brazo robótico utilizando los tornillos y tuercas.
– Monta los servomotores en la estructura del brazo robótico según el diseño previamente creado.
– Conecta los servomotores a la placa Arduino utilizando el cableado correspondiente.
4. Programación de Arduino:
– El siguiente es el código básico para programar el control de los servomotores, puedes adaptarlo a las necesidades de tu proyecto:
#include <Servo.h>
Servo servo1;
Servo servo2;
Servo servo3;
Servo servo4;
void setup() {
servo1.attach(9);
servo2.attach(10);
servo3.attach(11);
servo4.attach(12);
}
void loop() {
// Inserta aquí el código para controlar los servomotores según tus necesidades
}
Código fuente mejorado
Este código mejora el anterior al agregar control independiente para la base, el hombro, el codo y la pinza del brazo robótico. Además, ahora el brazo se mueve en incrementos de 5 grados para un control más preciso. También incluye la comunicación Bluetooth para el módulo HC-05.
#include <Servo.h>
#include <SoftwareSerial.h>
Servo servoBase;
Servo servoHombro;
Servo servoCodo;
Servo servoPinza;
int basePos = 90;
int hombroPos = 90;
int codoPos = 90;
int pinzaPos = 90;
SoftwareSerial bluetooth(2, 3); // RX, TX
void setup() {
servoBase.attach(9);
servoHombro.attach(10);
servoCodo.attach(11);
servoPinza.attach(12);
// Inicialización de posiciones
servoBase.write(basePos);
servoHombro.write(hombroPos);
servoCodo.write(codoPos);
servoPinza.write(pinzaPos);
Serial.begin(9600); // Iniciar comunicación serie con el monitor serial
bluetooth.begin(9600); // Iniciar comunicación serie con el módulo Bluetooth
// Mensaje de inicio
Serial.println("Brazo Robótico - Control por Bluetooth");
}
void loop() {
// Control del brazo robótico mediante comandos recibidos por Bluetooth
if (bluetooth.available()) {
char command = bluetooth.read();
switch (command) {
case 'B': // Mover la base en sentido horario
basePos += 5;
if (basePos > 180) basePos = 180;
servoBase.write(basePos);
break;
case 'b': // Mover la base en sentido antihorario
basePos -= 5;
if (basePos < 0) basePos = 0;
servoBase.write(basePos);
break;
case 'H': // Mover el hombro hacia arriba
hombroPos += 5;
if (hombroPos > 180) hombroPos = 180;
servoHombro.write(hombroPos);
break;
case 'h': // Mover el hombro hacia abajo
hombroPos -= 5;
if (hombroPos < 0) hombroPos = 0;
servoHombro.write(hombroPos);
break;
case 'C': // Mover el codo hacia arriba
codoPos += 5;
if (codoPos > 180) codoPos = 180;
servoCodo.write(codoPos);
break;
case 'c': // Mover el codo hacia abajo
codoPos -= 5;
if (codoPos < 0) codoPos = 0;
servoCodo.write(codoPos);
break;
case 'P': // Abrir la pinza
pinzaPos += 5;
if (pinzaPos > 180) pinzaPos = 180;
servoPinza.write(pinzaPos);
break;
case 'p': // Cerrar la pinza
pinzaPos -= 5;
if (pinzaPos < 0) pinzaPos = 0;
servoPinza.write(pinzaPos);
break;
}
}
}
Este código controla el brazo robótico mediante comandos recibidos por Bluetooth a través del módulo HC-05. Puedes enviar los siguientes comandos desde tu dispositivo Bluetooth para controlar el brazo robótico:
– ‘B’ para mover la base en sentido horario.
– ‘b’ para mover la base en sentido antihorario.
– ‘H’ para mover el hombro hacia arriba.
– ‘h’ para mover el hombro hacia abajo.
– ‘C’ para mover el codo hacia arriba.
– ‘c’ para mover el codo hacia abajo.
– ‘P’ para abrir la pinza.
– ‘p’ para cerrar la pinza.
Importante: Asegúrate de haber configurado previamente el módulo Bluetooth HC-05 con los parámetros de velocidad de transmisión (baud rate) adecuados (generalmente 9600 baudios) y de haber emparejado el módulo Bluetooth con el dispositivo desde el que enviarás los comandos.
5. Control por Bluetooth:
– Utiliza una aplicación de terminal Bluetooth en tu computadora o teléfono inteligente para enviar comandos al brazo robótico.
– Conecta el módulo Bluetooth HC-05 a la placa Arduino y configura la comunicación serial como lo indica el código fuente anterior.
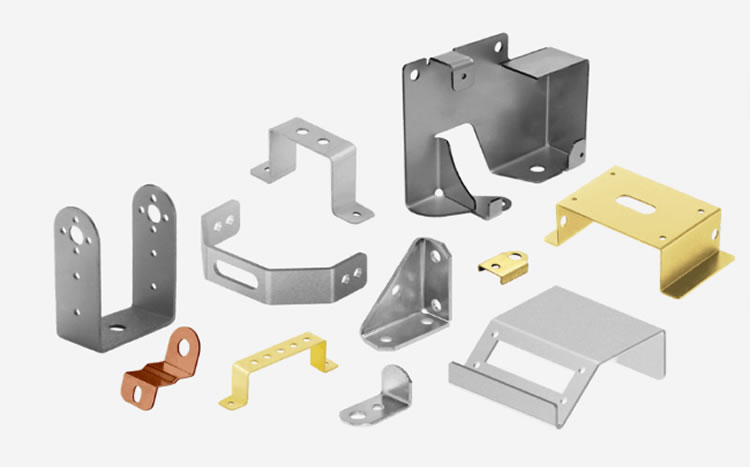
Facilidad de crear y diseñar piezas de metal cortadas por láser
Ya hablamos de LaserBoost.com en otro de nuestros artículos, y lo seguimos recomendando porque los resultados son verdaderamente excelentes. Basicamente se trata de un servicio en línea que permite a los usuarios diseñar y solicitar el corte por láser de piezas de metal a medida.
Ofrece una plataforma intuitiva donde los usuarios pueden cargar sus diseños, seleccionar el material y el grosor deseados, y obtener un precio instantáneo utilizando su cotizador en tiempo real. Es una herramienta útil para cualquier persona que necesite crear piezas personalizadas de metal de manera rápida, sencilla y económica para una variedad de aplicaciones en hogares, empresas o como regalos..
Para finalizar, hoy aprendimos que construir un brazo robótico controlado por Bluetooth con una estructura personalizada es un proyecto emocionante que combina la creatividad de la ingeniería con la precisión del corte por láser de piezas de metal. Con Arduino y servicios online de corte por laser cualquier persona puede llevar a cabo este proyecto de manera rápida, sencilla y económica. Sólo hay que animarse!
Si la quieres más fácil también puedes optar por alguno de los brazos robóticos que a vienen en kits listos para montar.